【MinHash, LSH】高维向量的相似度快速计算
前言
这阵子读论文遇到了MinHash,LSH 两个新的概念,一开始还有点不好消化,网上的文章写的也是五花八门,因此,根据自己的理解撰写一篇笔记,方便日后回看。
MinHash
要了解一个概念首先要从提出概念的问题开始,在自然语言或其他特征工程当中,我们经常会遇到多维度的特征向量(用于表征一个集合或文档),有的可能十几个特征,有的可能成百上千,对于两个特征向量,我们常常需要计算它们之间的相似度(如文档的相似性),计算的方法有很多,以Jaccard相似度为例:
其中,c是A,B中共同非零的特征个数,a,b分别为A,B中非零的特征个数。
我们重点关注的是计算的效率,如果每一维特征之间都要一一计算,这样的话随着特征维度的增加,计算复杂度会大幅上升,并且,我们真正关心的不是局部某个特征的差异,而是全局两个特征向量。因此,就考虑将原本非常大的特征向量映射到一个低维空间上,使得低维空间中两个向量之间的相似性接近原始特征向量的相似性,这就是MinHash的思想,得到的低维空间向量就是hash值。如下:
之所以是约等于是映射的过程中必然丢弃一些特征信息
那么,哪些是可以被丢弃的呢?显而易见,稀疏向量中的0。
先说一下MinHash的思想:
- 对文档(A,B,C,D)对应特征的行进行重排列
- 取排列后每列(对应文档)的第一个非零值即为
MinHash - 重复多次1-2步骤,得到原特征向量的新表示,称
signature,即降维后的新向量 - 计算两个
signature之间相等值的比例,即得到近似Jaccard相似度
对原理解释一下,我们对任意的两个特征向量A,B,它们在任意衣一行上的特征取值有三种情况:
- 均为1:总数记为x
- 一个为1,一个为0,总数记为y
- 均为0:两者均不考虑,跳过
那么两个向量MinHash相等的概率即为$\frac{x}{x+y}$,再看Jaccard的计算,显然有$Jaccard(A,B) = \frac{x}{x+y}$,因此
但由于前者是概率,在实际计算中,我们需要计算多次(即多个MinHash),实现对Jaccard的估计。
这部分可以理解为抛硬币的理论正面概率为1/2,实际测试概率需要多次实验计算抛掷结果为正面的比例
当我们计算m次MinHash后,A,B分别得到由MinHash组成的两个新低维向量$sig(A)=(h1(A), h2(A), …, h_m(A)), sig(B)=(h1(B), h2(B), …, h_m(B))$,接着只需要计算两个向量中相等值的比例就得到了估计的Jaccard
其中$h_i$表示第i个
MinHash函数
举个例子,有4个特征向量$A(0,1,1,0),B(0,1,0,1),C(1,0,1,0),D(0,1,1,1)$,用矩阵表示如下:
| A | B | C | D | |
|---|---|---|---|---|
| 1 | 0 | 0 | 1 | 0 |
| 2 | 1 | 1 | 0 | 1 |
| 3 | 1 | 0 | 1 | 1 |
| 4 | 0 | 1 | 0 | 1 |
例如将第4行换到第1行(重排列): 注意下划线1对应每列第一个非零行
| A | B | C | D | |
|---|---|---|---|---|
| 1 | 0 | 1 | 0 | 1 |
| 2 | 0 | 0 | 1 | 0 |
| 3 | 1 | 1 | 0 | 1 |
| 4 | 1 | 0 | 1 | 1 |
此时得到(A,B,C,D)对应MinHash为(3,1,2,1)
如果仅用此代表原来的文档,则得出结论,B,D最相似,其他两两不相似,事实上A,D也有一般特征相同,这是因为特征丢弃太多导致
用同样的方法,这次我们交换1-2行(在原特征向量的基础上)
| A | B | C | D | |
|---|---|---|---|---|
| 1 | 1 | 1 | 0 | 1 |
| 2 | 0 | 0 | 1 | 0 |
| 3 | 1 | 0 | 1 | 1 |
| 4 | 0 | 1 | 0 | 1 |
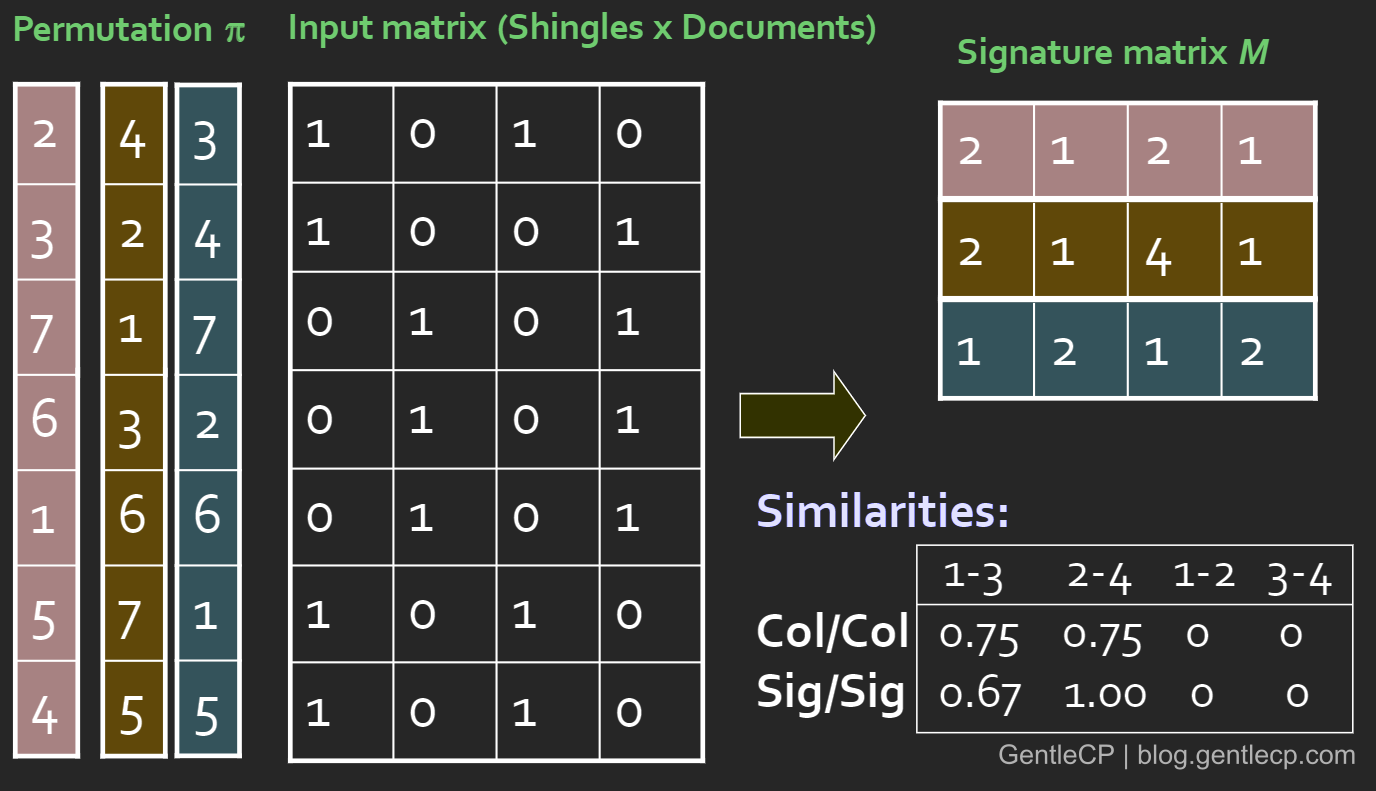
此时得到对应MinHash为(1,1,2,1),与上面的特征结合,得到A,B,C,D的低维表示(signature matrix):
| A | B | C | D | |
|---|---|---|---|---|
| 1 | 3 | 1 | 2 | 1 |
| 2 | 1 | 1 | 2 | 1 |
A,D的相似度从0%到了50%。
仔细观察上面的重新排列,本质上是对行进行了映射,第一次是$(1,2,3,4)\to(4,1,2,3)$, 第二次是$(1,2,3,4)\to(2,1,3,4)$,映射的操作可以通过hash函数模拟实现。
之所以将重排列换成
hash是因为hash的计算成本比全排列要低得多
下面是用hash替代重排列计算signature的算法步骤:
for each row r do begin
for each hash function hi do
compute hi(r)
for each column c
if c has 1 in row r
for each hash function hi do
if hi(r) < M(i,c) then
M(i,c) := hi(r)
end解读一下:首先我们需要准备一些
hash function,例如h1(x) = x%m+1, h2(x)=2*x%m +2(m是行数),对每一行(行号)计算其被每个hash functionhash得到的值(这相当于是做了重排列,因为行号通过hash从原始行映射到了一个新行),按照原本MinHash的思路,我们应该在hash得到的新行中按照新行号(1-m)顺序取最先的非零值,转换到算法中就是第三个for循环做的事情。对每一列(就是每个文档),计算其MinHash, M(i,c)(i指行号),只关心那些包含非零值的行,然后看这个行的行号和现有的M(i,c)谁小(小说明重排列后的位置靠前),然后用较小值更新M(i,c)
上面的方法可以说很巧妙地避开了复杂的重排列计算,值得细细品味。
用hash替代排列的例子,可以参考[1],或者如下我从网上[2]摘录的例子,这里不再重复。
对于MinHash,有两点需要说明:
hash函数(低维特征数)的增加会提高计算特征向量之间的精确性,但实际问题中很多向量是稀疏的,因此因为降维导致的相似度差异可以忽略- 采用
hash难免会有碰撞,但当数量级很大时,这部分的影响也可以忽略
LSH
MinHash降低了两个高维向量之间的计算复杂性,但还有一个需要考虑的问题是,我们需要对大量的向量之间进行两两比较,如果每个都直接比较,复杂度是$O(N^2)$(N是向量个数),是否有一种方法,将潜在的可能相似度高的向量聚在一起,将相似度低的向量分开?
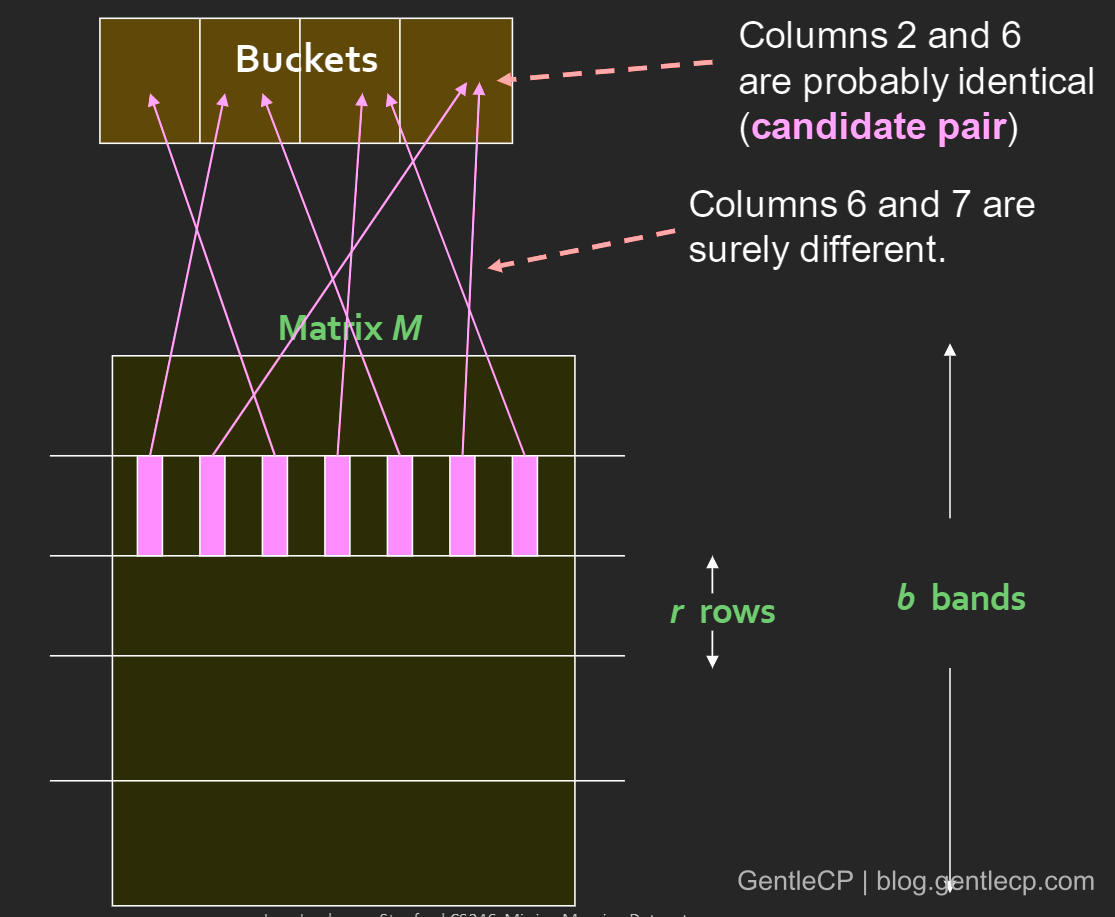
LSH(Locality Sensitive Hashing)做的就是这个事情,其基本思想为:我们不需要去比对所有的文档,将所有的文档(columns) hash到许多桶中,形成候选匹配对,只有同一个桶中的signature会进行匹配
这里我们需要定义一个相似的标准,即认为两文档相似,应该分到一个桶中的阈值,设为t,只有两个文档的Jaccard值超过t才会被分到一个桶中。
LSH基于此,将原signature matrix按行划分成多个band,每个band的宽度是r,显然有b*r=num of hash function for MinHash,然后对band内每个signature段hash,形成多个桶,如下图:
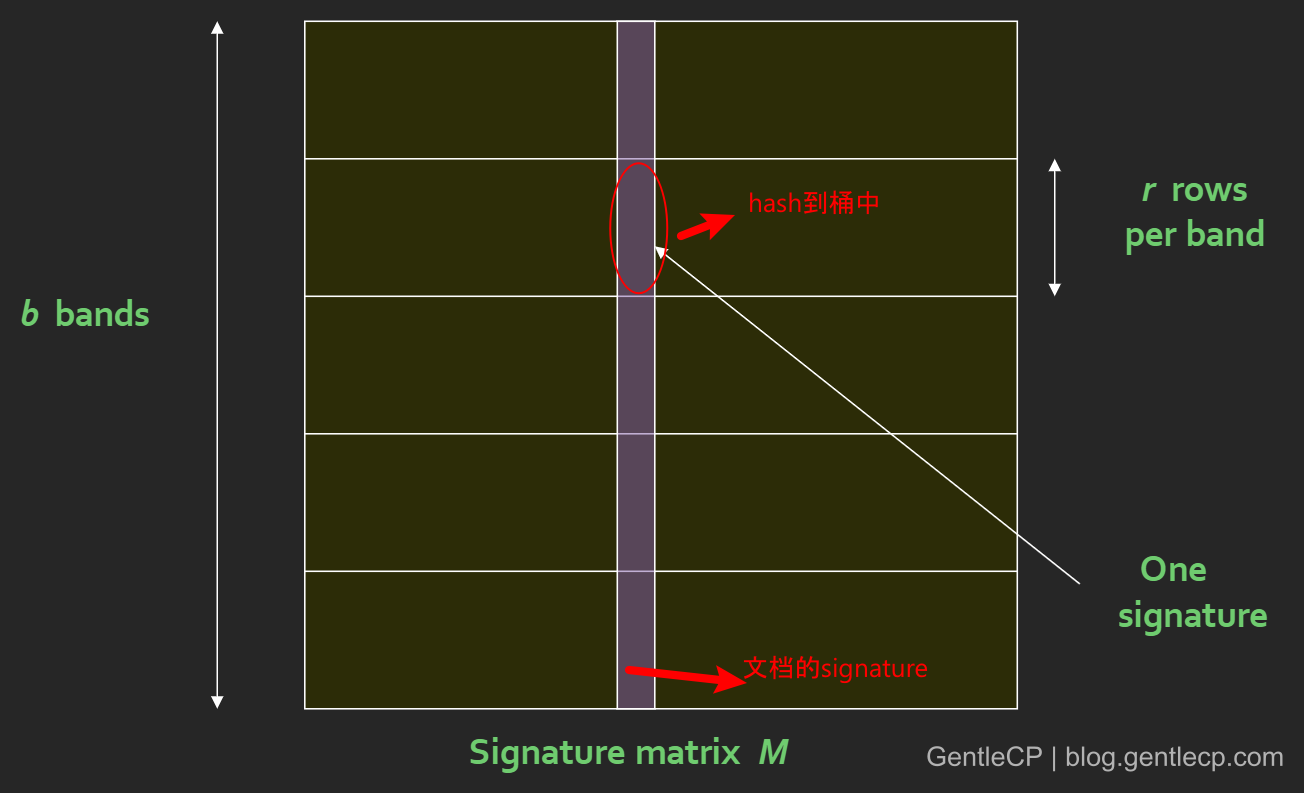
两个文档作为候选匹配的充要条件是至少有一个band的hash在同一个桶中
每个
band对应的桶是独立的,不影响
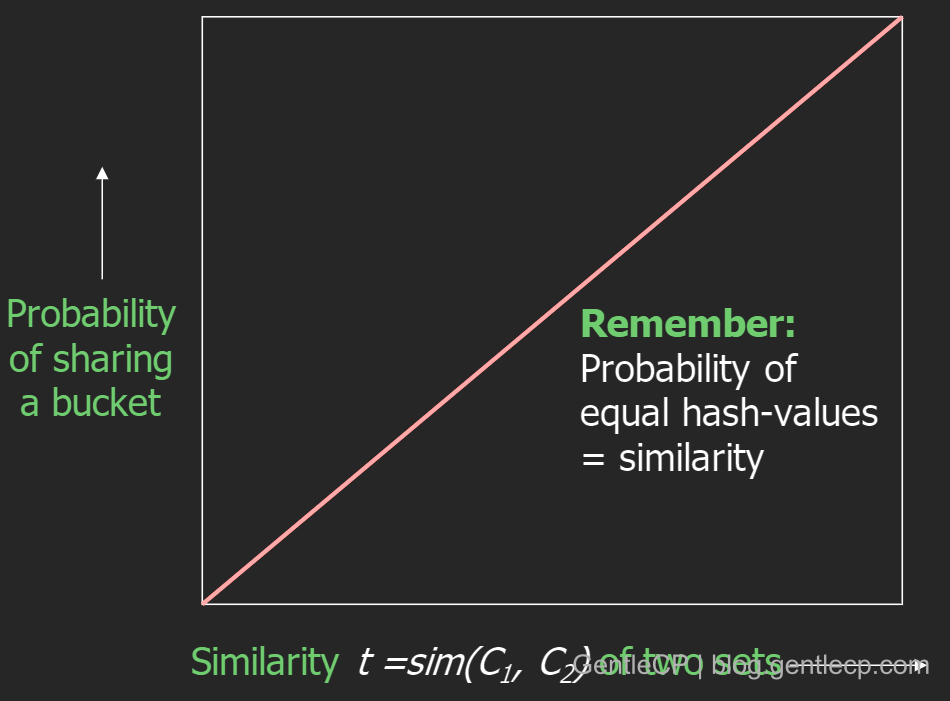
为什么上面这种用局部hash去猜测全局相似性的方法可行呢?还记得之前说的两个MinHash相等的概率等于Jaccard(两个文档的相似度),而MinHash相等意味着两者会被hash到同一个桶,因此相似度Jaccard越高,hash到同一个桶的概率也越高,同时呈现线性关系,如下图:
当我们确定了相似度阈值t,但hash分桶的时候仍然存在可能分错桶的情况,分别是:
- 本应认定不相似的分到了一个桶中:因为有小部分
MinHash会相当的概率 - 本应认定相似的没分到一个桶中:每个
bandHash的结果刚好都不一样
对应如下图区域所示:
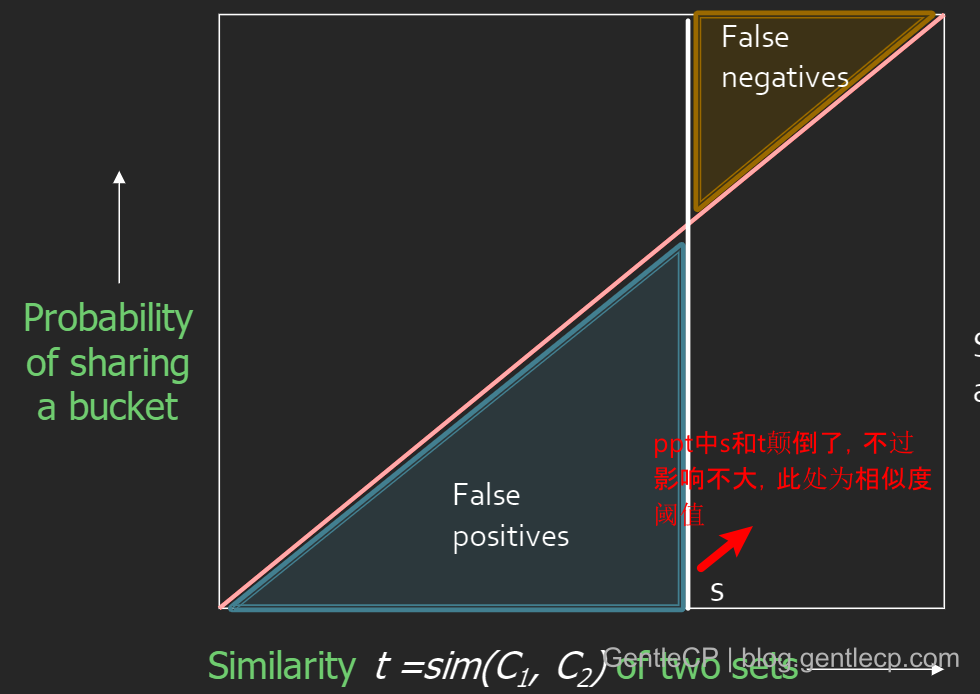
造成这种情况的原因是在对band的划分和hash function的数量(r*b),具体体现就是参数r,b。因此我们需要对这两者的选取进行调整,设s代表两个文档相似度(对应MinHash相同的概率),那么有:
- 一个
band内所有行都相等的概率是$s^r$ - 一个
band内至少有一行(一个MinHash)不相等的概率: $1-s^r$ - 所有
band都不相等的概率:$(1-s^r)^b$ - 至少有一个
band相等的概率;$1-(1-s^r)^b$
最后一个实际上就对应文档被划分到一个桶中的概率,看一组当两文档相似读不同时,其对应概率的变化(取r=5,b=20):
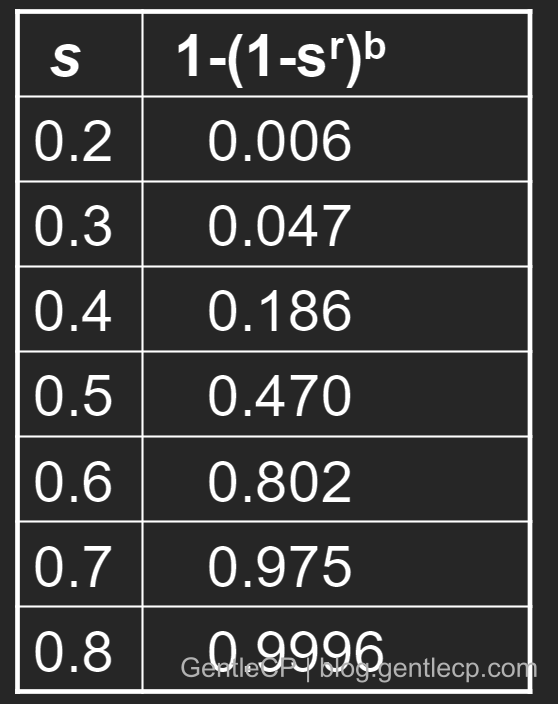
可以看出,相似度越大,越容易被hash到同一个桶中。但前面我们说了有个相似度阈值t,作为两文档是否相似的判定标准,它并不是说t=s=0.5来二分,实际上t是根据该函数$f(s)= 1-(1-s^r)^b$跃阶的点确定的,如下图:
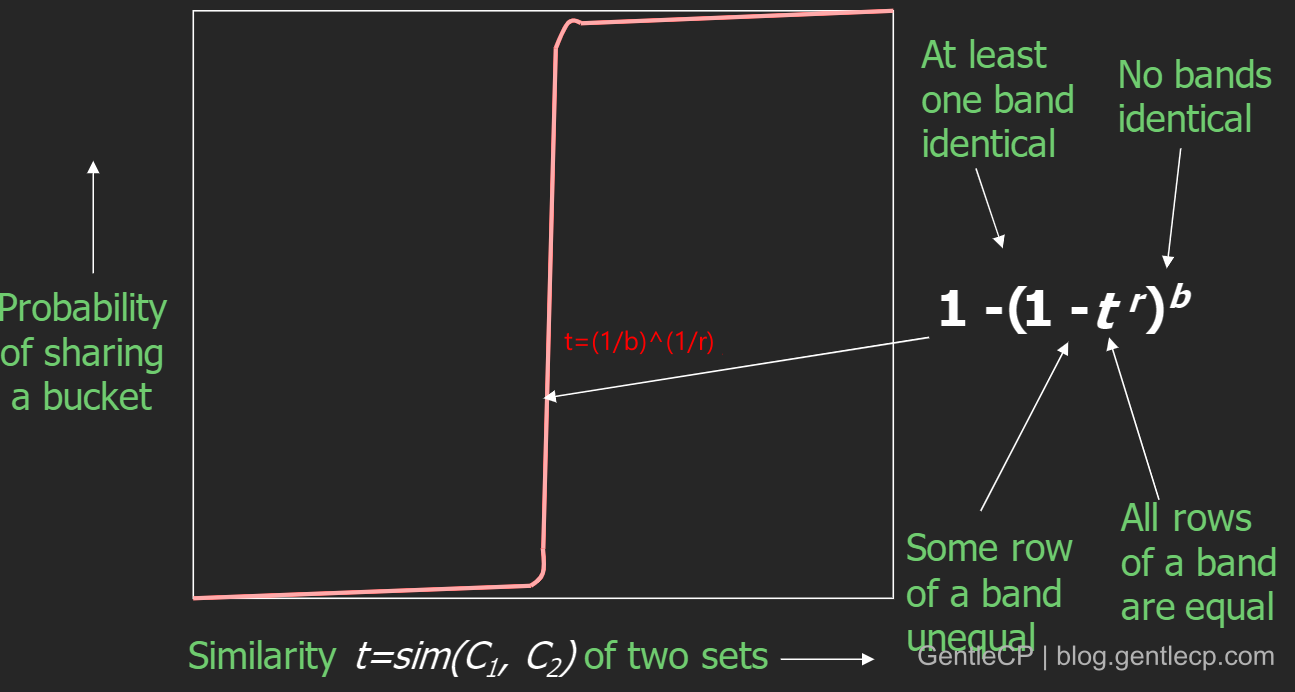
在图中标注的位置是函数跳跃最大的,换句话说就是导数最大的地方,因此应该将阈值设定在这个地方
由上我们可以知道,通过分段hash然后再对在一个桶中的候选signature进行相似度计算,这种方式可以在一定程度上保留对相似度的估计,同时大幅提升计算的效率(因为只需要匹配部分文档)。
还有一个问题就是r,b参数的选取,记得我们的优化方向:
- 避免本应认定不相似的分到了一个桶中:对应就是减小
False Positive,提高计算效率,就应该让阈值(即曲线最陡处)较大,这样那些相似性较低的就难以被分到一个桶中,但同时也会筛除一些潜在相似用户,降低了准确率。 - 避免本应认定相似的没分到一个桶中:对应就是减小
False Negative,提高准确率,就应该让阈值(即曲线最陡处)较小(如小于我们心中期望的$s_{min}$),这样所有我们认为应该相似的都会被分到一个桶中,但这显然会带来较大的计算量
上述的选择决定于阈值$t=(\frac{1}{b})^\frac{1}{r}$的取值,因此我们可以通过调整不同的b,r来达到相应的目的。
总结
本文是我看了许多讲述LSH的文章后,加入自己的理解撰写的一篇笔记,其中难免纰漏、错误之处,在阅读的过程中,我也发现网上的文章参差不齐,有的存在断章取义,使得对LSH, MinHash的理解存在偏差,最后是看了斯坦福大学的ppt,视频,并结合各家文章,才对这两者有了基本的理解,相应参考资料都放在了后面,感兴趣的可以自己阅读。
参考
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!